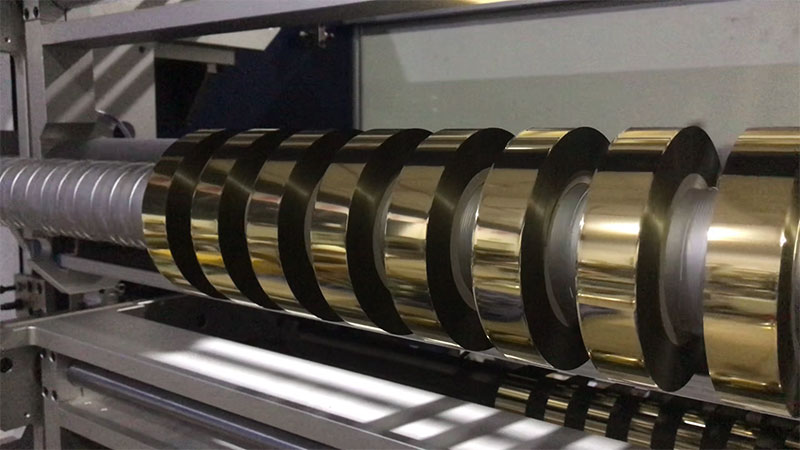
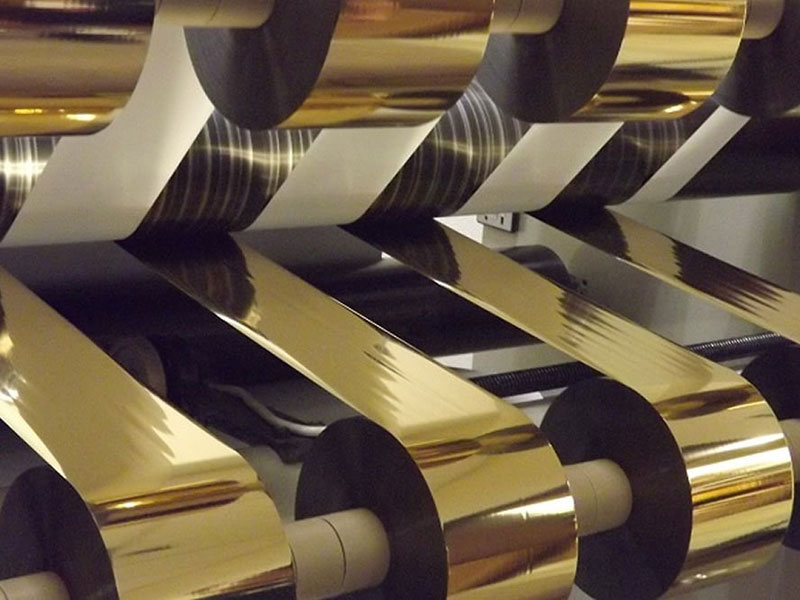
Trong quá trình gia công sau in các vật liệu màng có giá trị gia tăng cao như màng dập nóng, nhôm điện hóa, màng laser, v.v., chất lượng cuộn của máy cắt xẻ quyết định trực tiếp đến năng suất và hiệu quả của các công đoạn dập nóng in ấn tiếp theo. Tuy nhiên, độ lệch cuộn (thường được gọi là "cuộn không đều" và "cuộn hình tháp") là một trong những vấn đề phổ biến nhất trong ngành. Khi có sự uốn lượn hình zigzag hoặc mặt cuối không đều, nó có thể dẫn đến việc bỏ sót vật liệu, làm hỏng lưỡi cắt hoặc thậm chí gây đứt giấy.
Phản ứng đầu tiên của nhiều người là điều chỉnh độ song song của cảm biến hiệu chỉnh hoặc con lăn dẫn hướng, nhưng thường thì triệu chứng không được khắc phục. Yếu tố cốt lõi thực sự quyết định độ gọn gàng của mặt cuối cuộn dây là sự ổn định động của lực căng cuộn dây - tức là tốc độ phản hồi và độ chính xác điều khiển của vòng kín lực căng. Dưới đây, chúng tôi phân tích một cách có hệ thống cách loại bỏ độ lệch cuộn dây thông qua "ổn định nhanh vòng kín lực căng" từ cơ chế vật lý đến thực tiễn kỹ thuật.

1. Tại sao sự biến động về sức căng luôn dẫn đến sai lệch?
Đặc điểm của màng dập nóng là: độ dày mỏng (6~20μm), bề mặt nhẵn, độ giãn nở thấp và độ cứng yếu. Trong quá trình xẻ và cuộn, cuộn dây được cắt thành nhiều dải hẹp từ một cuộn lớn duy nhất, và mỗi dải hẹp được cuộn độc lập.
Nếu lực căng rút dao động định kỳ (ví dụ: độ lệch 5N mỗi 10 giây), thì phản ứng dây chuyền sau sẽ xảy ra:
1. Hiện tượng trượt đàn hồi:Lớp màng tạo ra một lượng nhỏ độ trượt dọc trục trên lõi cuộn dây, và hướng trượt của mỗi vòng dây là ngẫu nhiên, tích lũy dần thành độ lệch mặt cuối.
2. Sự mất cân bằng lực ngangSự dao động lực căng sẽ gây ra sự phân bố ứng suất không đồng đều tại các điểm khác nhau theo hướng ngang của màng, và màng sẽ tự động "trượt" về phía có lực căng cao hơn.
3. Lõi lỏng lẻoLớp bên trong sẽ bị giãn ra sau khi chịu lực căng quá lâu và không thể tự phục hồi sau khi cuộn dây bị lệch; Khi lực căng quá cao, màng phim bị kéo giãn và biến dạng, dẫn đến sự lệch vị trí giữa các lớp.
Do đó, vòng điều khiển căng thẳng kín không chỉ đơn thuần là "điều khiển căng thẳng không đổi", mà là một hệ thống servo cần phản hồi nhanh chóng, không vượt quá giới hạn và có khả năng chống nhiễu.
2. Ba điểm chết của phương pháp kiểm soát căng thẳng truyền thống
Nhiều máy xẻ rãnh sử dụng điều khiển mô-men xoắn vòng hở hoặc điều khiển PID vòng kín, rất dễ mất kiểm soát trong các trường hợp sau:
• Thay đổi đường kính trục lăn nhanh chóng:Từ trạng thái cuộn rỗng đến cuộn đầy, tỷ lệ đường kính cuộn có thể đạt tới 5:1, và mômen quán tính quay thay đổi mạnh. Nếu tham số PID được cố định, độ rung sẽ bị giật khi cuộn nhỏ và phản hồi sẽ chậm khi cuộn lớn.
• Quá trình tăng tốc và giảm tốcTrong quá trình khởi động-dừng và tốc độ nâng, lực quán tính tác động lên lực căng, gây ra hiện tượng tăng đột ngột lực căng và dẫn đến hiện tượng "nhảy lớp" tức thời khi cuộn lại.
• Các mối nối hoặc độ dày vật liệu không đồng đềuViệc dập nổi bằng màng nhôm thường có sự dao động về độ dày của giấy hoặc lớp phủ, đây là một nhiễu loạn đột ngột đối với vòng điều khiển lực căng kín. Bộ điều khiển PID thông thường cần 2-3 chu kỳ dao động để phục hồi, và sự sai lệch xảy ra trong các dao động này.

3. Chiến lược "vòng kín ba bước" để ổn định nhanh chóng
Để loại bỏ sai lệch, thời gian điều chỉnh của vòng kín lực căng phải được giảm xuống mức cho phép của các đặc tính vật liệu (thường yêu cầu ≤ 0,5 giây mà không bị vượt quá). Sau đây là cách thực hiện:
Bước 1: Áp dụng kiến trúc vòng kín kép "tốc độ + dòng điện"
• Vòng ngoài (vòng tốc độ): được cung cấp bởi bộ mã hóa hoặc cảm biến tốc độ tuyến tính để tránh hiện tượng bò chậm ở tốc độ thấp khi chỉ sử dụng mô-men xoắn thuần túy.
• Vòng trong (vòng dòng điện/vòng momen xoắn)Tốc độ phản hồi nhanh (mili giây) của bộ điều khiển servo điều chỉnh trực tiếp công suất đầu ra của động cơ.
• Điểm mấu chốtĐộng cơ cuộn dây phải hoạt động ở chế độ điều khiển mô-men xoắn, nhưng mô-men xoắn tham chiếu được tính toán theo thời gian thực dựa trên điểm đặt điện áp, và giới hạn tốc độ được thêm vào như một biện pháp bảo vệ an toàn.
Bước 2: Mạch điều khiển phản hồi động bù trừ cho đường kính cuộn dây và quán tính.
• Tính toán đường kính cuộn dây hiện tại trong thời gian thực (bằng tỷ lệ vận tốc tuyến tính trên vận tốc góc hoặc cảm biến siêu âm).
• Cập nhật thời gian thực hai thông số dựa trên đường kính trục lăn:
◦ Hệ số bù momen xoắn: T = F × (D/2), trong đó F là lực căng cài đặt và D là đường kính cuộn dây thực tế.
◦ Điều chỉnh quán tính: Một thành phần mô-men xoắn bổ sung ΔT = J × α được cộng thêm khi tăng tốc hoặc giảm tốc (J là mô-men quán tính của cuộn dây hiện tại, α là gia tốc góc).
• Bằng cách này, sự biến động điện áp thực tế có thể được kiểm soát trong phạm vi ±3% ngay cả ở tốc độ tối đa và khi lên xuống.
Bước 3: PID thích ứng + Khử nhiễu tần số thấp
• Đối với các dao động điện trở thường gặp trong khoảng 0,5~5Hz của màng dập nóng (như độ lệch tâm của con lăn kéo, sự mất cân bằng động của trục giãn nở khí), bộ lọc thông dải hoặc bộ lọc loại bỏ dải tần được tích hợp vào bộ điều chỉnh PID.
• Điều chỉnh PID mờ hoặc tham chiếu mô hình: tự động điều chỉnh hệ số khuếch đại Kp và thời gian tích phân Ti khi sự thay đổi đường kính thể tích vượt quá ngưỡng. Ví dụ, Kp được giảm xuống để tránh hiện tượng giật khi thể tích nhỏ, và Kp được tăng lên để tăng cường khả năng chống nhiễu khi thể tích lớn.
• Dữ liệu đo được cho thấy thời gian điều chỉnh vòng kín tối ưu có thể được rút ngắn từ 2~3 giây xuống còn dưới 0,3 giây so với phương pháp điều khiển truyền thống, và không có hiện tượng vượt quá giới hạn.

Thứ tư, bốn "kẻ giết người vô hình" trong quá trình thực hiện dự án.
Ngay cả khi thuật toán lý thuyết hoàn hảo, vẫn có thể xảy ra sai lệch tại hiện trường. Những chi tiết sau đây không thể bỏ qua:
1. Vị trí lắp đặt cảm biến lực căngCảm biến phải nằm gần con lăn dẫn hướng cuối cùng trước khi cuốn dây, và khe hở ổ trục phải ≤ 0,01mm. Dây tín hiệu cảm biến phải cách xa dây nguồn của bộ biến tần.
2. Áp suất bơm hơi của trục cuộn dâyĐối với lõi giấy 3 inch hoặc 6 inch, áp suất không khí phải đồng đều và ổn định (khuyến nghị sử dụng bộ điều chỉnh vòng kín). Nếu áp suất không đủ, lớp bên trong sẽ bị trượt, còn nếu áp suất quá cao, lõi giấy sẽ bị biến dạng.
3. Con lăn nổi độc lập cho từng dải hẹp sau khi xẻ.Đối với các dải cực hẹp có chiều rộng dưới 20mm, nên bổ sung thêm các con lăn nổi siêu nhỏ vào mỗi trạm cuộn để tạo lớp đệm giảm chấn cơ học bằng trọng lực hoặc các xi lanh ma sát thấp.
4. Thời điểm hiệu chỉnh cạnh và điều chỉnh độ căng vòng kínThao tác hiệu chỉnh sẽ tạm thời thay đổi chiều dài đường đi của màng, do đó ảnh hưởng đến lực căng. Cần phải thiết lập điều này trong PLC: tại thời điểm thực hiện thao tác hiệu chỉnh, bộ điều khiển PID lực căng sẽ tạm thời đóng băng thành phần tích phân, và sau đó sẽ tiếp tục hoạt động sau khi quá trình hiệu chỉnh hoàn tất.
5. Kiểm chứng hiệu quả: từ "có thể nhìn thấy bằng mắt thường" đến "dữ liệu có thể đo lường"
Độ lệch cuộn dây tối ưu có thể được đánh giá định lượng:
• Sai lệch mặt cuốiSai số: ≤±0,5mm (điều kiện làm việc bình thường) / ≤±1,0mm (điều kiện làm việc có gia tốc và giảm tốc).
• Đỉnh điểm dao động điện áp:Sai số tối đa ±5% so với giá trị đã đặt.
• Thời gian điều chỉnh: ≤0,5 giây (tính từ thời điểm xảy ra nhiễu loạn đến khi trở lại trạng thái ổn định).
Người dùng nên thực hiện "thử nghiệm từng bước" trong quá trình sản xuất thực tế: thay đổi nhanh giá trị cài đặt tốc độ cuộn lại một cách nhân tạo khoảng ±10%, ghi lại đường cong cảm biến lực căng bằng bộ thu thập dữ liệu tốc độ cao và quan sát độ vọt lố và số dao động. Nếu dạng sóng có thể hội tụ trong một chu kỳ, điều đó có nghĩa là quá trình ổn định vòng kín đạt yêu cầu.
Lời kết
Sự lệch hướng cuộn dây của máy cắt màng dập nóng về bản chất không phải là vấn đề "hiệu chỉnh", mà là vấn đề "lực căng". Chỉ bằng cách làm cho vòng điều khiển lực căng kín có ba khả năng chính: phản hồi nhanh, thay đổi đường kính cuộn dây thích ứng và triệt tiêu nhiễu loạn cơ học, thì hiện tượng cuộn dây ngoằn ngoèo mới có thể được loại bỏ tận gốc. Đối với các nhà sản xuất thiết bị, đây không chỉ là vấn đề thay thế bộ điều khiển PID, mà còn là một dự án có hệ thống về truyền động servo, độ cứng cơ học và độ chính xác của cảm biến. Khi mặt cuối cuộn dây của bạn gọn gàng như dao cắt, điều đó có nghĩa là bạn đã nắm vững bản chất của việc kiểm soát lực căng.


 Máy cắt lá nguội
Máy cắt lá nguội Máy cuộn ruy băng in thẻ
Máy cuộn ruy băng in thẻ Máy cắt ruy băng in thiệp
Máy cắt ruy băng in thiệp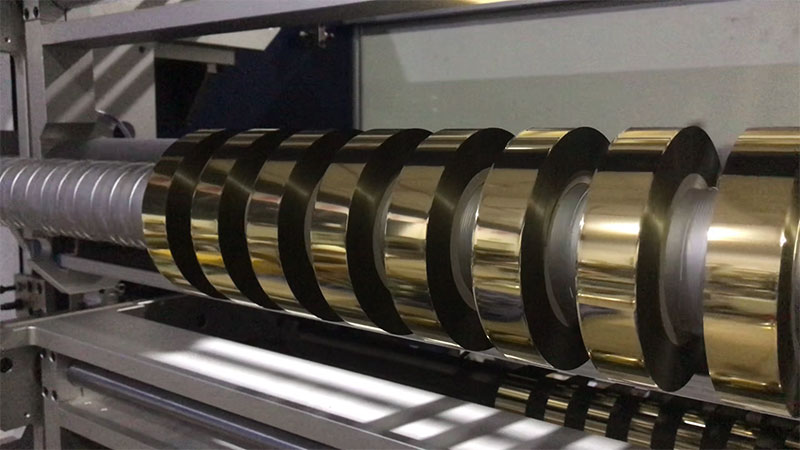 Máy cắt lá kim loại ba chiều
Máy cắt lá kim loại ba chiều Máy cắt lá dập nóng (RSDS7H) 1350
Máy cắt lá dập nóng (RSDS7H) 1350 Máy cắt lá dập nóng RSDS7H 1350 PLUS
Máy cắt lá dập nóng RSDS7H 1350 PLUS Máy cắt xẻ màng dập nóng
Máy cắt xẻ màng dập nóng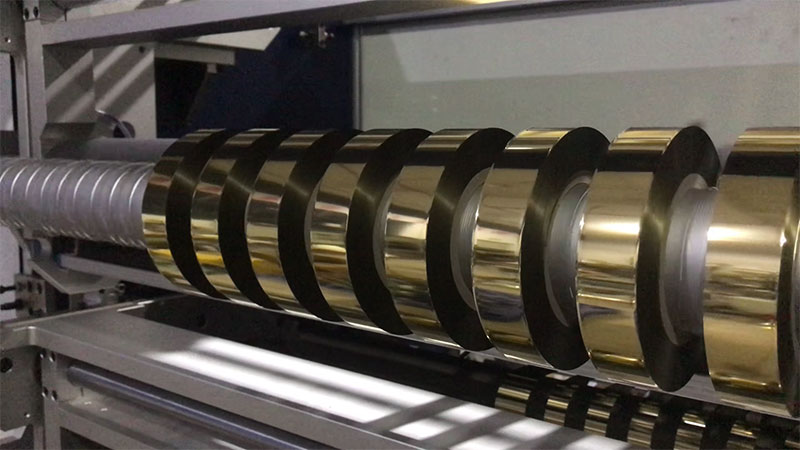 Máy cắt màng in lụa
Máy cắt màng in lụa





